8.4 KiB
| title | createTime | permalink | icon |
|---|---|---|---|
| VMWare安装ROS2 | 2025/02/24 07:42:27 | /learning-notes/ROS2/VMWare-install/ | lineicons:vmware |
本文主要介绍如何在VMWare WorkStation中安装Ubuntu22.04LTS和ROS2,并配置固定IP地址和SSH连接,使用教育网联合镜像站配置Ubuntu和ROS2的软件镜像源。
:::info 参考资料 古月居文档 https://www.originbot.org/guide/pc_config/#ubuntu_install
华为云文档 https://blog.csdn.net/m0_54219225/article/details/127170419
此文档完成后,固定好的IP地址为 192.168.8.8
:::
虚拟机系统: VMware WorkStation 17.0
SSH连接工具:MobaXterm Home Edition、VS Code
Ubuntu安装
::: steps
- 下载镜像
请安装:[logos:ubuntu 2em]: Ubuntu版本: 22.04 LTS,如果您在高校内,推荐使用CERNET校园网联合镜像站,安装Python3后可以使用以下脚本测试您的网络到各镜像站的连接速度 。
curl https://mirrors.cernet.edu.cn/oh-my-mirrorz.py | python3
重庆市高校推荐使用重庆大学Ubuntu ISO镜像,实测重医到重大的下载速度可达78MB/S。
- 设置软件源
Ubuntu默认的软件源下载较慢,切换为校园网镜像源或阿里云镜像源会好很多。
::: tabs @tab 重庆大学镜像
参考 https://mirrors.cqu.edu.cn/#/wiki/mirror-wiki/ubuntu
@tab 阿里云镜像
参考 https://developer.aliyun.com/mirror/ubuntu
@tab 校园网联合镜像站 参考 https://help.mirrors.cernet.edu.cn/ubuntu/
:::
固定IP地址
每次VMWare Workstation的虚拟机重启后, DHCP [+vuepress] 会自动分配一个新的IP地址,使用SSH连接很不方便,我们可以设置固定IP地址。 [+vuepress]: VuePress 是一个 静态站点生成器 (SSG) 。 专为构建快速、以内容为中心的站点而设计。 ::: details Windows11
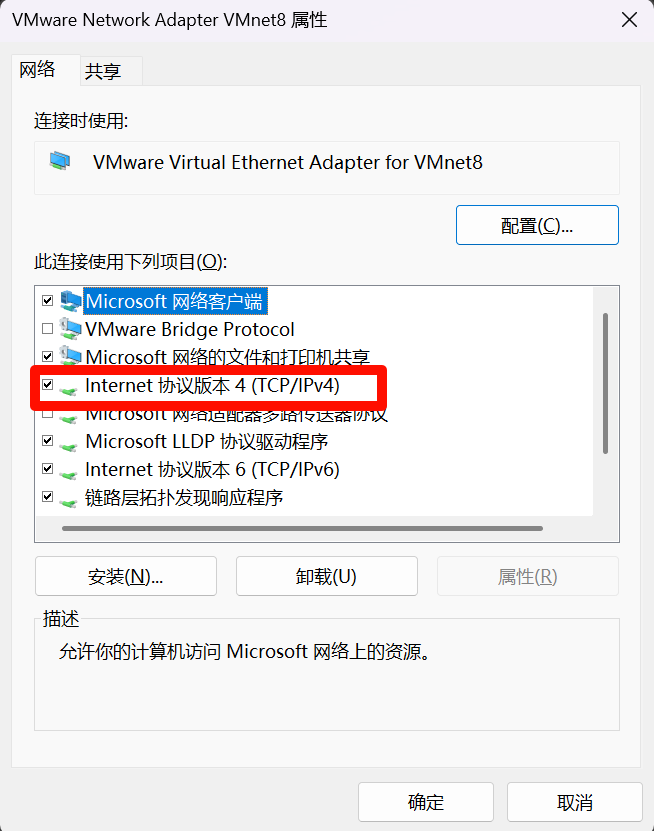
设置VMnet8的IPV4地址
打开Windows11设置,找到网络和Internet-更改适配器选项-VMware Network Adapter VMnet8-编辑-Internet协议版本4-属性-使用以下IP地址


:::
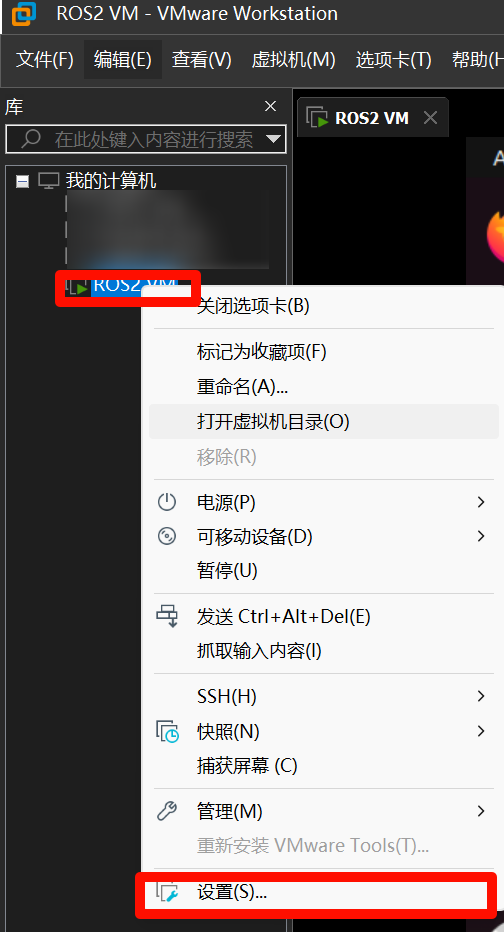
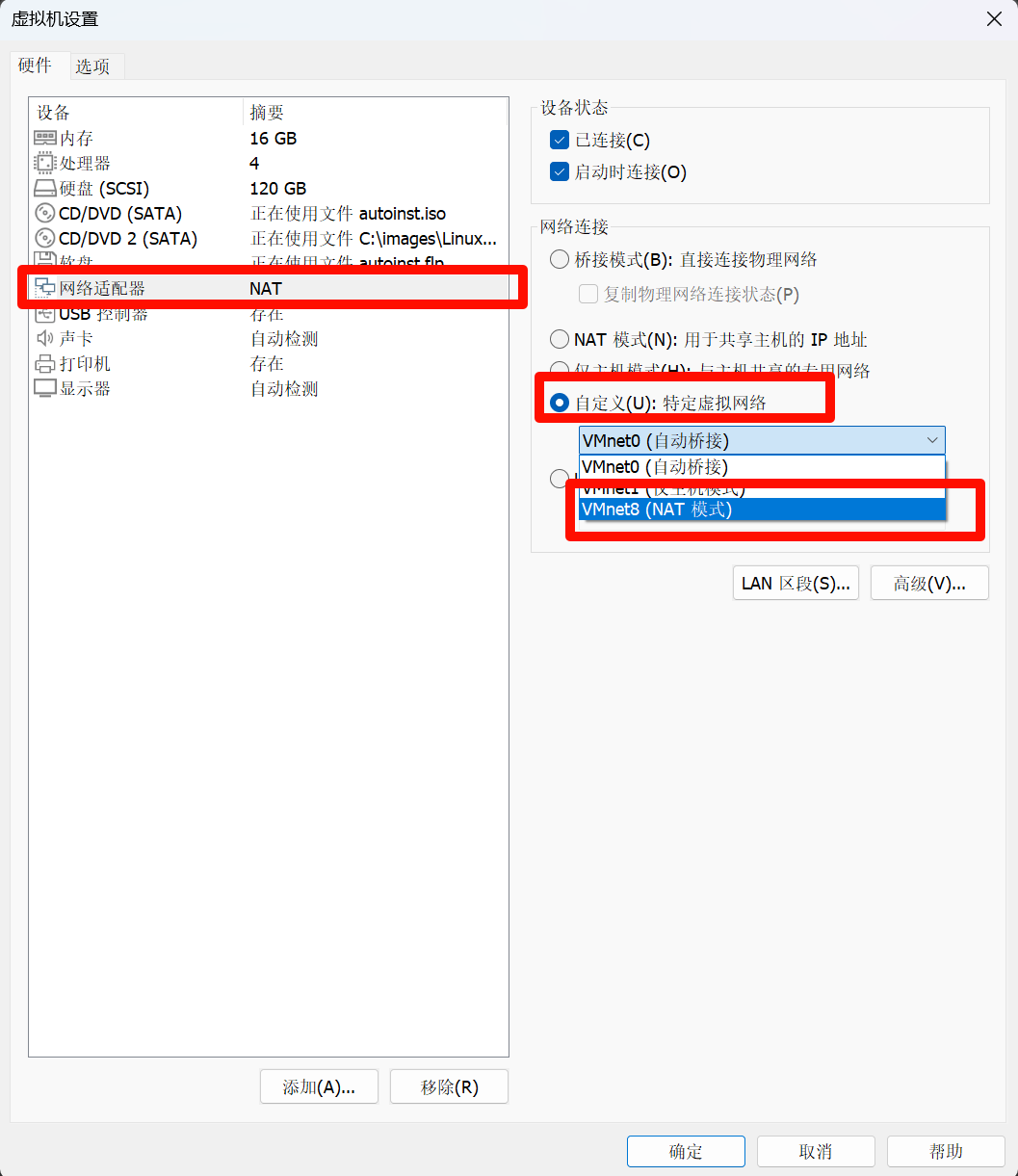
:::details VMWare配置
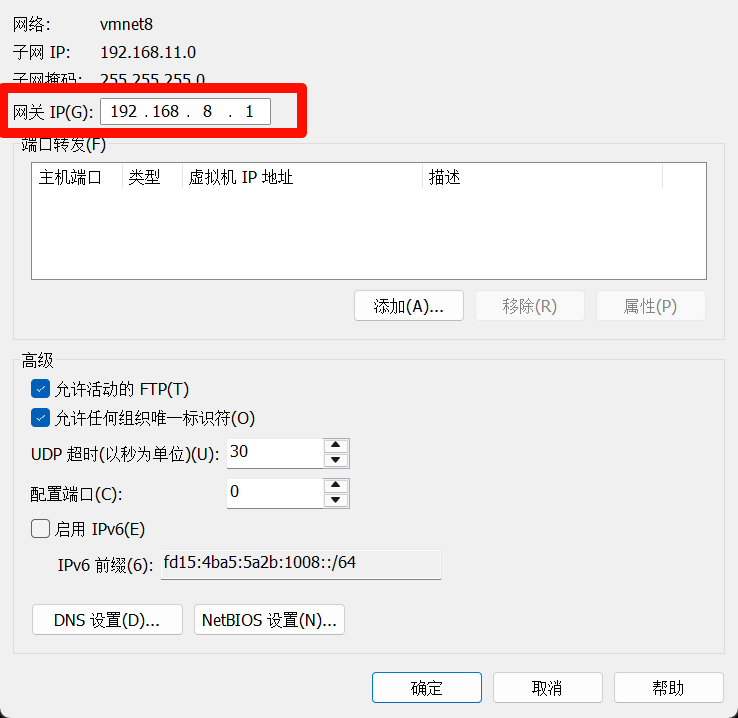
实际VMWare 在NAT模式下分配的子网网段可能会有不同,这里设置为192.168.8.0;
查看子网:编辑-虚拟网络编辑器-VMnet8-子网IP

点击NAT设置
设置网卡
 :::
:::
使用你喜欢的编辑器编辑 /etc/netplan/01-network-manager-all.yaml
nano /etc/netplan/01-network-manager-all.yaml
:::info 如何快速使用nano删除
标记所有内容: 按 Ctrl+A 跳转到行首。
按下 Ctrl+Shift+6(或 Alt+A)开始标记。
按 Alt+/ 跳转到文件末尾,此时会标记从开头到末尾的所有内容。
删除标记内容:按 Ctrl+K 剪切(删除)选中部分。
:::
# Let NetworkManager manage all devices on this system
network:
renderer: NetworkManager
version: 2
ethernets:
ens33:
dhcp4: no
addresses:
- 192.168.8.8/24
routes:
- to: default
via: 192.168.8.1
nameservers:
addresses: [ 8.8.8.8, 114.114.114.114, 233.5.5.5 ]
:::info IP解释
192.168.8.8是本地中未被占用的CIDR地址,也是是你想设置的固定地址192.168.8.*是VMware WorkStation的NAT模式子网网段,网关设置为同一网段即可转发流量,例如此处的192.168.8.1,不可为广播地址.255或主机地址.08.8.8.8是Google的DNS服务器114.114.114.114是国内移动、电信和联通通用的DNS,可拦截钓鱼、木马病毒网站,提供更快的解析速度,。233.5.5.5是阿里云的DNS服务器 :::
持久化网络配置
sudo systemctl enable systemd-networkd
sudo systemctl start systemd-networkd
安装网络管理工具包
sudo apt install net-tools
最后输入使配置生效
netplan apply
查看ip信息是否符合预期
ifconfig
配置SSH
以 root 身份登录终端
:::steps
- 安装SSH服务端
sudo apt update
sudo apt install openssh-server
- 启动SSH服务
sudo systemctl start ssh
sudo systemctl status ssh
- 设置开机自启动
sudo systemctl enable ssh
- 放行防火墙
sudo ufw allow ssh
- 修改SSH配置
此处启用了root登录、密钥登录,只是为了方便开发,生产环境请谨慎。
sudo nano /etc/ssh/sshd_config
找到 PermitRootLogin, 取消注释并修改为
PermitRootLogin yes
PubKeyAuthentication yes
重启以生效
sudo systemctl restart ssh
连接测试
:::tabs
@tab :[tabler:brand-powershell]:MobaXterm
打开MobaXterm,sessions-SSH,填入你的主机固定IP和密码等,出现下面画面即为连接成功

可以使用 sudo passwd 临时更改root密码
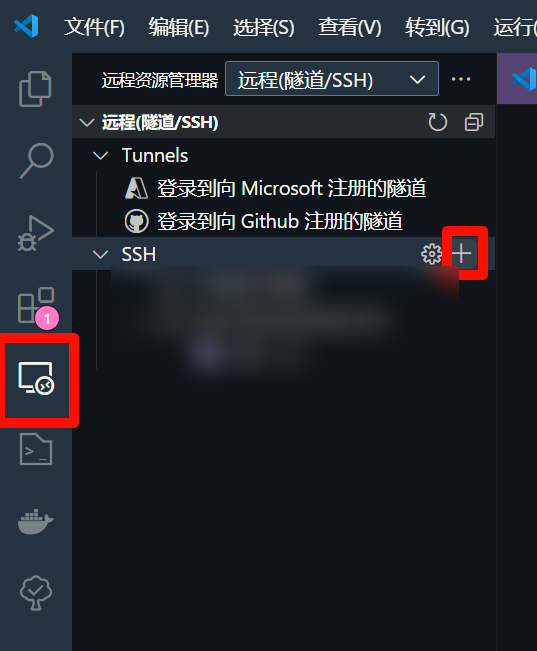
@tab :[devicon:vscode]:VS Code
安装SSH拓展
添加链接-输入账密即可
:::
生成密钥(推荐)
如果您希望使用SSH密钥进行身份验证,可以在客户端计算机上生成密钥:
ssh-keygen -t rsa -b 4096
一路回车就行,.ssh\id_rsa.pub即为生成的密钥,以 ssh-rsa开头,长这样:

# linux传输key
ssh-copy-id username@your_server_ip
Windows系统直接打开MobaXterm,将{user}.ssh的id_rsa.pub的内容写入到服务器上的 ~/.ssh/authorized_keys文件中,没有就手动创建一个。
:::
ROS2系统安装
:::warning
这里以Ubuntu22.04LTS 的Humble ROS2版本为例
:::
:::steps
- 设置编码
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
- 配置镜像源
ROS2的软件包在各大高校、企业均有镜像地址,使用镜像可帮助我们更高效下载所需资源。
重庆市高校推荐重庆大学ROS2软件镜像源。这一步如果存在下载问题,可以参考 magic
添加ROS2的GPG Key
sudo apt install curl gnupg2
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
智能选择校园网镜像写入ros2的软件列表
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] https://mirrors.cernet.edu.cn/ros2/ubuntu jammy main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update

- 安装ROS2
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop
- 设置环境变量
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc
- ROS2示例测试
当然是我最喜欢的小海龟啦~。需要启动两个终端:
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
第一句指令将启动一个蓝色背景的海龟仿真器,第二句指令将启动一个键盘控制节点,在该终端中点击键盘上的“上下左右”按键,就可以控制小海龟运动啦。
关于小海龟中蕴藏的ROS奥义,我们在后续教程中将持续探索。
至此,恭喜您,ROS2在VMware安装成功。
:::